 |
INNOVATION: Simulationssoftware
Die Simulationssoftware "VaneSim" - (Parametric pendulum oar wind vane self steering system simulation) erleichtert das Verständnis der Reaktion des Servo-Pendelrudersystems auf Abweichungen vom Sollkurs zum scheinbaren Wind. Weiterhin ist es damit möglich, unterschiedliche Bedingungen zu untersuchen: Seegang, Wind, Bootsgeschwindigkeit, Bootswendigkeit - sowie alle Parameter, die das Verhalten des Systems beeinflussen, wie Achsenneigung der Windfahnenachse, USU- oder USD-Windfahne, Verhältnis von Windfahnenausschlag zu Servoruderausschlag, Zeitkonstante der Pendelruderbewegung, Hebelverhältnis von Servoruderhebel zu Pinnenansatz der Steuerleinen usw... Es gibt einen Einschritt - Modus sowie einen Echtzeitmodus Systemvoraussetzungen: PC, Windows. Es ist keine Installation notwendig, das Programm muss nur aus dem Archiv entpackt werden, und ist sofort startbereit. Über jedem Parameter wird ein Tooltip angezeigt, der die Bedeutung des Parameters erklärt. Die Software ist kostenfrei (ganz ausdrücklichen und herzlichen Dank dafür nachträglich an alle Sponsoren, die dies möglich machten). Und hier geht's zum Download der Light-Version ohne Kraftrechnung: VaneSim.zip (250kByte), so sieht die Programmoberfläche der 600 kBytes schlanken Software aus: (Update 04_2009_01: -Verbesserte Simulation der Bootsreaktion basierend auf Messwerten. - Verbesserte Berücksichtigung der Strömungsgeschwindigkeit der Medien auf die Achsendrehgeschwindigkeiten - Zeitschritte eingebbar in 1/sek Update 04_2009_02: - Massenträgheitsmoment des Schiffes berücksichtigt, Einfluss der Drehung des Bootes auf die Anströmwinkel des Wassers am Servoruder sowie am Ruder berücksichtigt. Einfluss der Krängung auf den Drehmoment-Output des Ruders sowie des Servoruders berücksichtigt. |
|||||||||
 |
||||||||||
|
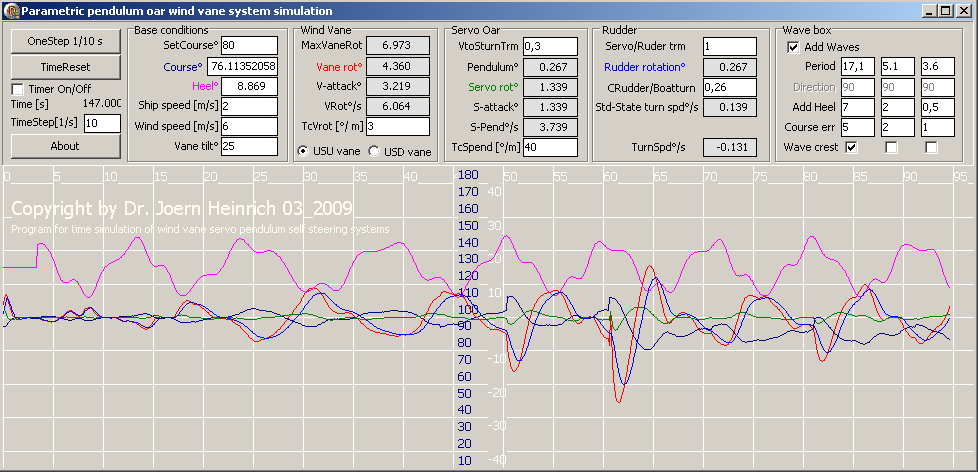
Die X-Achse ist die Zeitachse in Sekunden, die Hochachse mit den blauen Zahlen ist der Kurs zum scheinbaren Wind (Achterlicher Wind =180°, Amwind=40°). Die Hochachse mit den weißen Zahlen von -40 .. + 40 ist die Achse, auf die sich die folgenden Kurven beziehen: - Krängung (Heel, lila) Man kann alle Parameter während der laufenden Simulation ändern, es ergibt sofort eine Einflussnahme auf das Systemverhalten. Zu beachten ist, dass die Verantwortung der Anwendung beim Anwender liegt, der Autor übernimmt keinerlei Gewährleistung auf Richtigkeit oder Vollständigkeit der mit dem Programm ermittelten Daten. Die Software basiert nicht auf aerodynamisch- / hydrodynamisch berechneten Kräften, sondern darauf, dass die zeitliche Änderung des Winkels jeder Drehachse proportional des Sinus des Anstellwinkels und der Geschwindigkeit der mit der Achse verbundenen Flächen im jeweiligen Medium sind. Diese Näherung mittels Zeitkonstanten ist nur bei kleinen Anstellwinkeln richtig. Dies gilt es bei der Bewertung von Berechnungsergebnissen der Software zu beachten. Weiterhin liegen in der vorliegenden Softwareversion die folgenden vereinfachenden Annahmen zugrunde: Zeitkonstante der Windfahnendrehung: Das Trägheitsmoment der Windfahne samt Gegengewicht, das Verhältnis von Windgeschwindigkeit zu Fläche/Form der Windfahne, die gegenwärtige dynamische Balance des Servoruders sowie das Flächenverhältnis Windfahne zu Servoruder stecken als Summenparameter darin. Zeitkonstante fürs Servoruderpendel: In dieser Zeitkonstante stecken als Summenparameter die Flächenverhältnisse von Servoruder zu Ruder, Reibung der Seilzugübertragung, Reck bei Zug auf einer Steuerleine, zeitlich ausgemittelte Hysterese zwischen Pendel und Ruder, Größe der Auftriebskraft des Servoruderprofils bei bestimmtem Anstellwinkel im Wasser. Zeitkonstante fürs Ruder (CRuder/Boatturn): Der Ruderwinkel-Bootskreis-Koeffizient beschreibt einfach den linearen Zusammenhang zwischen Ruderwinkel und der Zeit, die das Boot dann für einen Vollkreis braucht. Bei definierter Geschwindigkeit. Die Rollbewegung des Bootes wird noch nicht auf das Servoruder zurückgekoppelt. Es ist noch keine Rückkopplung des Zusammenspiels Ruder/Servoruder gemäß des Flächenverhältnisses vorhanden. Zukünftige Ergänzungen geplant: - Berücksichtigung der Flächen-und Balanceverhältnisse von Servo- und Hauptruder - Aero- und Hydrodynamische Kräfteberechnung unter Nutzung von XFoil |
||||||||||
|
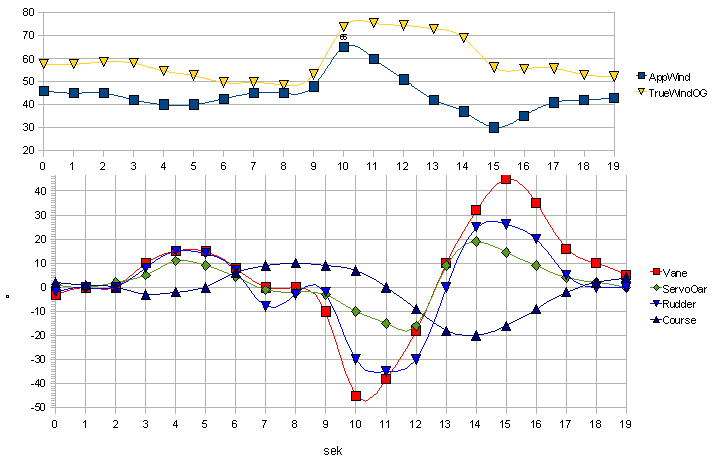
Simulationsüberprüfung Eine erste Überprüfung der Simulationssoftware erfolgt anhand von Wind-, Kurs-, Windfahnen-, und Ruderwinkeldaten aus einer Videoanalyse. |
||||||||||
 |
||||||||||
|
Die Eingangsdaten für das Rechnermodell sind die sekündlich tabellierten Werte des wahren Windes (über Grund) aus der Videoanalyse. Es ist eine hervorragende Übereinstimmung der Simulation mit der Wirklichkeit festzustellen, sowohl was die zeitliche Abfolge als auch die erzielten Absolutwinkel angeht. Allein die Bootsreaktion ist immer noch nicht hinreichend genau modelliert - die Formen der Kurskurven unterscheiden sich noch zusehr. Ausserdem muss eine Hysterese der Steuerleinen bessere Berücksichtigung finden. |
||||||||||
 |
||||||||||
|
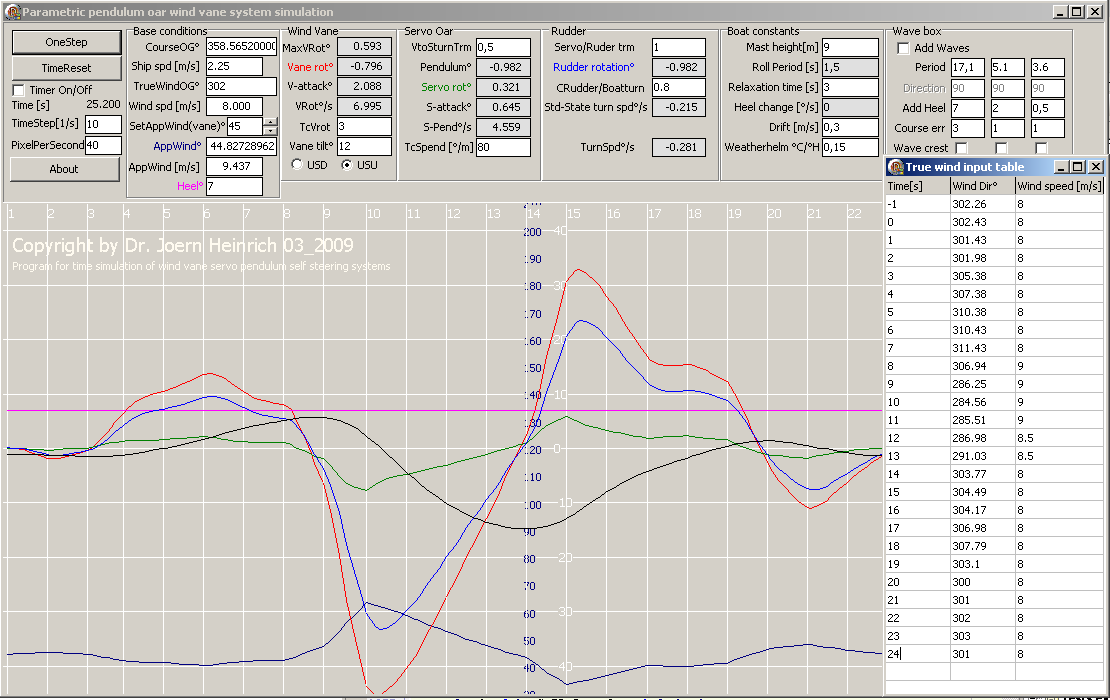
Das Modell ist für die folgende Simulation verfeinert: Die Drehgeschwindigkeit des Bootes wird bei der Berechnung des Angriffswinkels der Wasserströmung am Servoruder sowie Ruder über eine Geschwindigkeitsvektoraddition berücksichtigt. Ausserdem wird die Drehbewegung des Bootes jetzt über das Massenträgheitsmoment, den Drehimpuls und das Drehmoment des angestellten Ruders physikalisch korrekt berechnet. |
||||||||||
 |
||||||||||
|
Zweck? Meine Motivation, eine empirisch-parametrische Simulationssoftware für Windselbsteuerungsanlagen zu schreiben, kommt aus der Notwendigkeit, die Dimensionen und Parameter solcher Anlage an unterschiedliche Schiffs-See-und Windbedingungen anzupassen. Dinge, die man ab und an im Betrieb der Anlage auch beobachten kann, aber denen man normalerweise keine große Bedeutung beimißt - und die mit einem Handgriff (Segeltrimm / Windfahnenachsenneigung / WindfahnenTransmission) zumeist abgestellt sind. Bei viel Wind sowie auf Glattwasser steuern die meisten Anlagen brauchbar. Im Mittel-bis Schwachwindbereich sowie im raumen Seegang jedoch scheiden sich die Geister. Aber bei einer WSA gibt es auch immer Limitierungen - es gibt nicht "Die optimale Anlage". Das gilt sowohl für prinzipiellen Aufbau (USD/USU-Windfahne, mit/ohne Hilfsruder, usw, usw) als auch für konstruktive Details. |
||||||||||